La palabra Robot fue creada en 1921, por Capek a partir de la palabra checa «Robota» que significa servidumbre o trabajo forzado. De ella, ha habido muchas derivaciones como la palabra rusa “rabota”, que es traducida simplemente como trabajo. El concepto no sólo se enfocaba en un objeto externo, sino en los propios hombres que el industrialismo de la mano del Taylorismo que estaba transformando a las personas en autómatas del trabajo y esclavos de la fábrica y de la maquinaria que establecía las tareas y los ritmos. Se visualizaba a los hombres como robot de las maquinas herramientas. Era una mirada asociada al concepto de la enajenación del hombre que producía al trabajo, cuando este abandonada su concepto creativo para tornarse en un conjunto de tareas automatizadas. La mecanización y la automatización eran vistas como formas de enajenación y con ello abandonando el concepto del trabajo como realización. Los hombres se volvían robot al insertarse en la dinámica que imponían las maquinas herramientas de la cadena de montaje. Era la visión de Chaplin en Tiempos Modernos. Desde allí, el concepto de robot se fue transformando en un ser independiente de los hombres y que lo sustituyen por sus capacidades superiores.
El robot se ha conformado como un extensión mecánica del hombre dotado de capacidades físicas superiores para complementar a las personas. Con más fuerza física o con más capacidad de resistencia al entorno, mayor movilidad o capacidades físicas. Con la superación de la mecánica y la irrupción del mundo digital, se lo comenzó a visualizar hibrido. Luego con la genética, se los pensó como clon y ahora con la inteligencia artificial, como una estructura mecánica y en red se abre una nueva frontera. En este desarrollo del robot se lo comienza a concebir como un componente intermedio en el proceso de trabajo. Es una herramienta que se articula entre el hombre y la máquina-herramienta. Este concepto de herramienta y de interfase es el enfoque de los actuales robots. Son una herramienta terminal de una máquina que le permite realizar trabajos específicos con software y con conexiones especiales en red a la nueva sociedad de plataformas.
Este concepto de robot en sus diversas vertientes de desarrollo se ha focalizado en el mundo de la fábrica, pero también se han desarrollado versiones prácticas en el mundo de la educación. La educación virtual o a distancia constituye un tipo de educación en red articulada con software y que en múltiples casos utiliza interfases. Aquellas desarrolladas para personas con discapacidades son una expresión de ello.
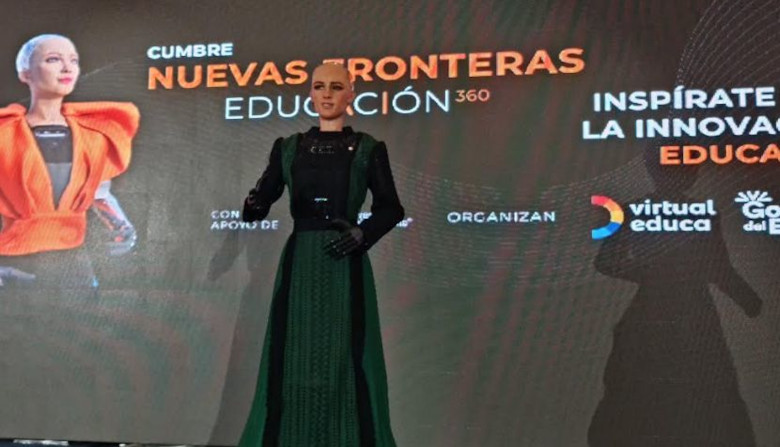
Esta reflexión viene a cuento ya no sólo en sus aspectos conceptuales, sino a que esta semana tuve la ocasión en el marco del Encuentro de Virtual Educa realizado en Guayaquil, Ecuador, junto con la UEES, la Universidad de Espíritu Santo, de ver avances e interactuar con dos formas de robot educativos. Sophie, es un robot humanoide (ginoide) impulsado por inteligencia artificial realizado por Hanson Robotics (Hong Kong). Dotado de ruedas, con forma antropomorfa de mujer y conectado por Internet al software de IA generativo GPT 3.5., . Es una versión avanzada y actualizada de una producción piloto que irrumpió en el 2015. En tanto robot es una articulación hibrida de una estructura mecánica, de actividades de información y comunicacionales para enseñanza. Tiene una relativa autonomía con sus ruedas y sensores, e interactúa respondiendo preguntas, bajo un formato de chatbot con interfaces de voces y múltiples lenguajes. La compañía trabaja en uno más pequeño concebido para su uso en los escritorios de los profesores y de apoyo a los estudiantes en sus procesos de aprendizaje.
La otra iniciativa que tuve ocasión de conocer es PERSI (Proyecto Educativo de Reinserción Social Integral) que es un robot que permite interactuar entre docentes y estudiantes, y que se conforma como un interface entre docentes desde afuera y estudiantes y que está concebido para permitir dar clases, en línea a las personas privadas de la libertad (PPL). Por la naturaleza de las cárceles no se conecta por internet sino por radio frecuencia con docentes desde afuera. El robot tiene ruedas para moverse, una altura de un metro, un monitor de computadora frontal para mostrar al docente y desde la parte superior de atrás tiene un proyector que permite mostrar láminas. El robot posee motores tanto para permitir el giro de la cabeza como para su movilidad. Tiene cámara, parlantes y micrófonos además de la pantalla y el proyector. El control del robot se realiza a través de un software en forma remota y tiene una conexión a una carga de 110 voltios y las baterías que carga le dan una autonomía de 8 horas a sus dos motores. Actualmente se usa en 8 cárceles con profesores que desde diversos institutos técnicos brindan clases.
Son dos expresiones de otra educación virtual y a distancia que irrumpe y que deben ser miradas con atención en el futuro,